|
|
[NOW OPEN] Make Future City into Reality: NEXCOM Future City Virtual Expo
NEXCOM Future City Virtual Expo is Now Open! Start...
[NOW OPEN] Make Future City into Reality: NEXCOM Future City Virtual Expo
|
Modular EtherCAT Robotic Solution Kicks R&D in High Gear to Fuel Robot Boom
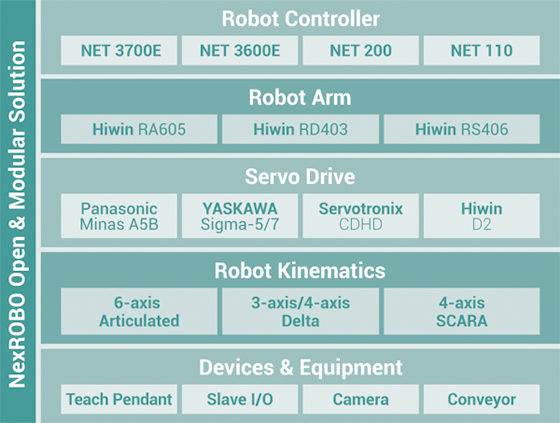
NEXCOM EtherCAT robotic solution, NexROBO, introduces openness and modularity to the rigid robot architecture, unleashing possibilities for in-house development, add-on functionality, and reconfiguration of robots. Based on an open and modular architecture, NEXCOM EtherCAT robotic solution delivers development flexibility and expandable functions with both hardware and software building blocks. Integrating a variety of EtherCAT Master controllers, pre-validated third-party EtherCAT slaves, and NEXCOM EtherCAT Master development stack, the solution stimulates the broad use of robotic systems and industrial robots to fuel the robot boom in manufacturing.

NEXCOM EtherCAT robotic solution breaks robot systems into discrete modules to liberate system integrators and robotics engineers from specification lockdown. The solution offers a broad selection of NEXCOM EtherCAT Master controllers, robot arms, drives and motors, I/Os, industrial cameras, and teach pendants; engineers can choose ones that best fit an application’s needs. Building, expanding, and reconfiguring robots with desired functions are now viable and simple thanks to the modular design.
This flexibility is further enhanced with NexECM—an EtherCAT Master development stack—of NEXCOM EtherCAT robotic solution. As EtherCAT communication is leveraged for robotic control, NexECM provides pre-validated compatibility and smooth communication between NEXCOM EtherCAT Master controllers and EtherCAT slave modules from different brands. More importantly, control algorithms are pre-written and APIs embedded to accelerate the planning and control of industrial robots of 6-axis articulated robots, delta robots, and SCARA robots. With unprecedented flexibility from the bottom to the top of the robot development, manufacturers can create robot applications in-house, retaining industry expertise and hands-on knowledge inside the organization.
In addition to industrial robots, the solution can also coordinate with EtherCAT-based industrial automation and control systems, extending the scope of automation across the factory floor. For the implementation of production line integration, collaborative robot (CoBot) systems, machine vision integration, and other advanced control applications, NEXCOM experts are at the service of system integrators and robotics engineers for consult and support.
NEXCOM EtherCAT Robotic Solution
| NEXCOM EtherCAT Master Controller | |||
| NET 3700E-ECM | High-performance EtherCAT Master controller powered by Intel® Core™ i7-4770TE processor | ||
| NET 3600E-ECM | High-performance EtherCAT Master controller powered by Intel® Core™ i5-3610 processor | ||
| NET 200-ECM | Front-access compact EtherCAT Master controller powered by Intel® Celeron® processor J1900 | ||
| NET 101-ECM | Front-access compact EtherCAT Master controller powered by Intel® Atom™ processor E3826 | ||
| Robot Arm | |||
| Hiwin RA 605 | 6-axis articulated robot | ||
| Hiwin RD 403 | Delta robot | ||
| Hiwin RS 406 | SCARA robot | ||
| EtherCAT AC Servo Drive and Motor | |||
| Panasonic Minas A5B | Panasonic EtherCAT communication drive and motor | ||
| YASKAWA Sigma-5/Sigma-7 | YASKAWA AC servo drive/motor | ||
| Servotronix CDHD | Servotronix high performance servo drive and motor | ||
| Hiwin D2 | Hiwin AC servo drive and motor | ||
| EtherCAT I/O | |||
| AXE-9200 | 16ch digital input and 16ch digital output EtherCAT slave module | ||
| Teach Pendant | |||
| TP 100 | 10.1” multi-touch teach pendant | ||
| Industrial Camera | |||
| ROKA 30 | 0.3-megapixel camera with 100 fps | ||
| ROKA 130 | 1.3-megapixel camera with 60 fps | ||
| ROKA 500 | 5-megapixel camera with 15 fps | ||
| NexECM EtherCAT Master Development Stack | |||
| Built-in EtherCAT configurator | |||
| Control algorithms of inverse kinematics, point-to-point movement, etc | |||
| CiA 402 motion library support | |||
| Support up to 64 EtherCAT slaves | |||
Ordering Information
Please contact NEXCOM
- Related Links:
- NexAIoT Tech Day – Digitalization and Safety Robots Innovate Green Manufacturing
- NexCOBOT’s SRB, Your Ultimate UR+ Robot Gateway Integrator
- Browse Other News:
- Scale Smarter Edge Deployments with NEXCOM FTA 5190 & Xeon 6 AI Inside
- When You Knows but Can’t Act: The Hidden Hurdle in Semiconductor Smart Manufacturing
- All Products News